


Getting Started with Fully Sharded Data Parallel (FSDP2)#
Author: Wei Feng, Will Constable, Yifan Mao
참고
 Check out the code in this tutorial from pytorch/examples. FSDP1 is deprecated. FSDP1 tutorials are archived in [1] and [2]
Check out the code in this tutorial from pytorch/examples. FSDP1 is deprecated. FSDP1 tutorials are archived in [1] and [2]
How FSDP2 works#
In DistributedDataParallel (DDP) training, each rank owns a model replica and processes a batch of data, finally it uses all-reduce to sync gradients across ranks.
Comparing with DDP, FSDP reduces GPU memory footprint by sharding model parameters, gradients, and optimizer states. It makes it feasible to train models that cannot fit on a single GPU. As shown below in the picture,
Outside of forward and backward computation, parameters are fully sharded
Before forward and backward, sharded parameters are all-gathered into unsharded parameters
Inside backward, local unsharded gradients are reduce-scatterred into sharded gradients
Optimizer updates sharded parameters with sharded gradients, resulting in sharded optimizer states
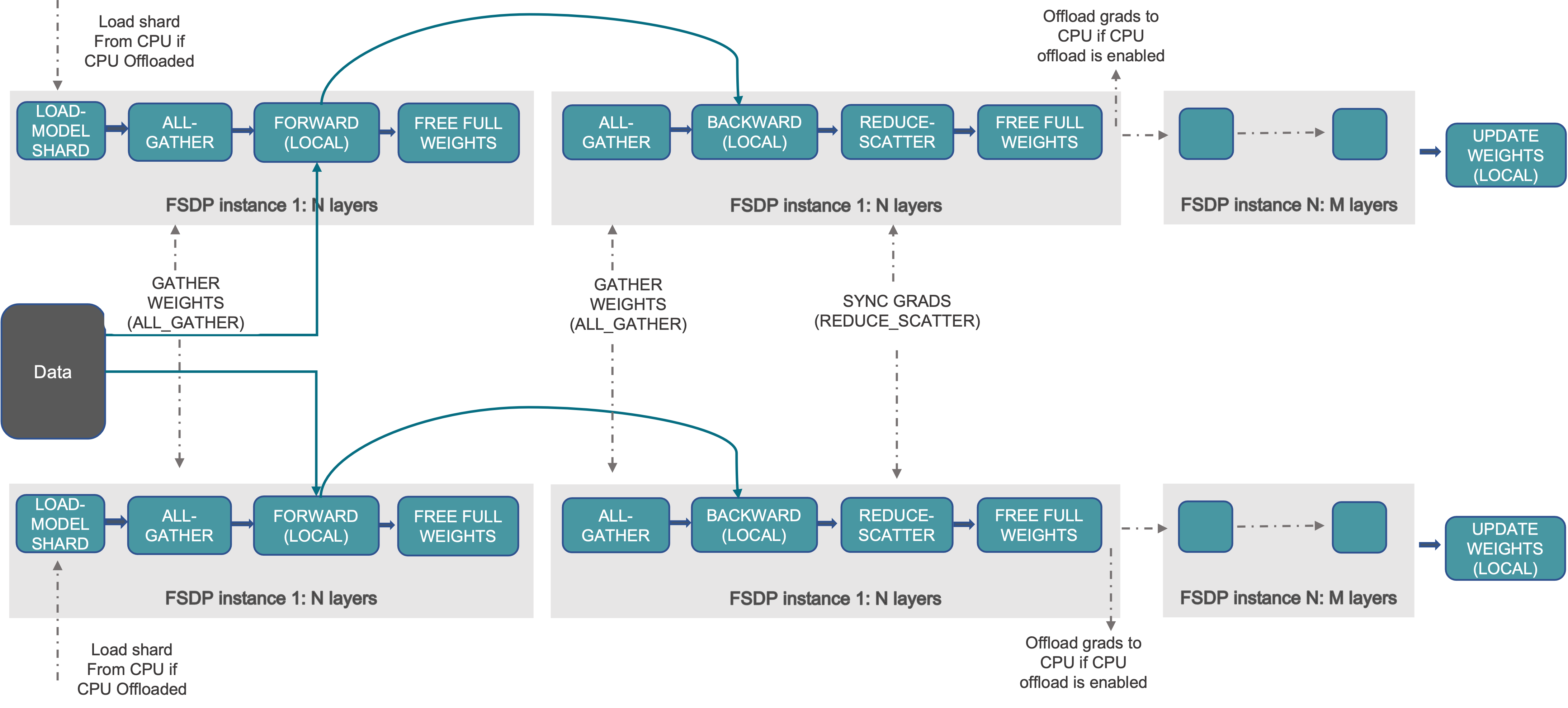
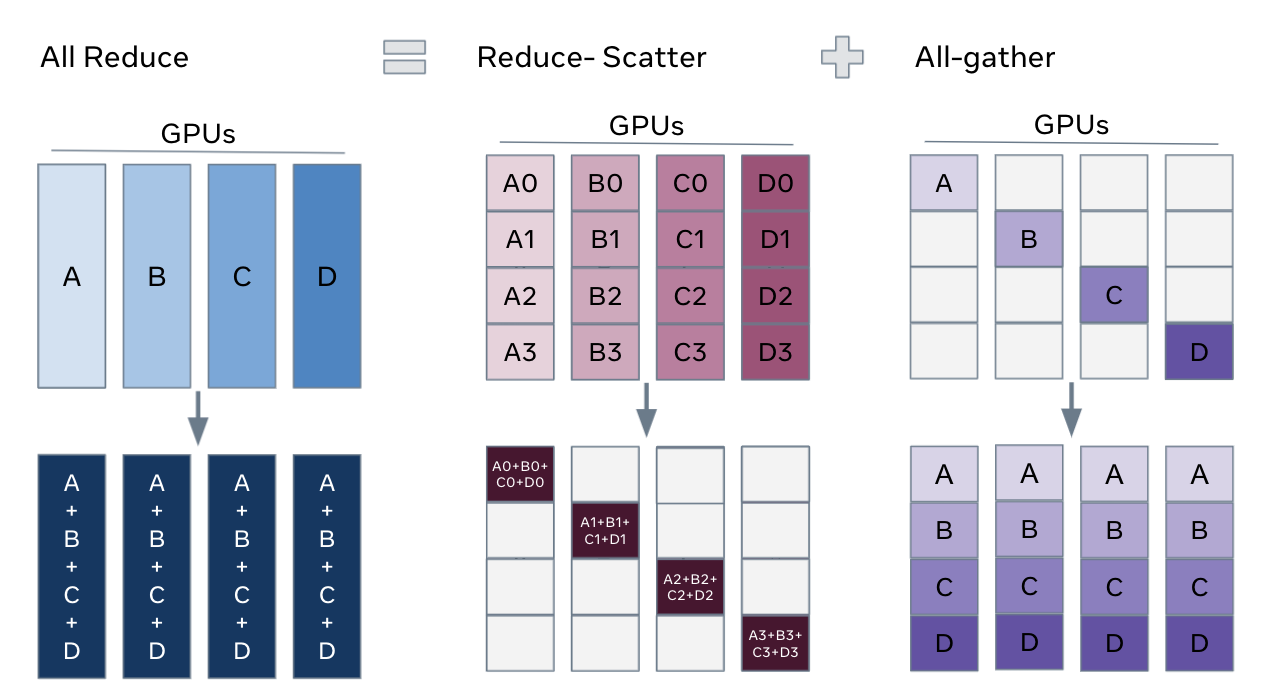
FSDP can be considered a decomposition of DDP’s all-reduce into reduce-scatter and all-gather operations
Comparing with FSDP1, FSDP2 has following advantages:
Representing sharded parameters as DTensor sharded on dim-i, allowing for easy manipulation of individual parameters, communication-free sharded state dicts, and a simpler meta-device initialization flow.
Improving memory management system that achieves lower and deterministic GPU memory by avoiding
recordStream(doc) and does so without any CPU synchronization.Offering a tensor subclass extension point to customize the all-gather, e.g. for float8 all-gather for float8 linears (doc), and NF4 for QLoRA (doc)
Mixing frozen and non-frozen parameters can in the same communication group without using extra memory.
How to use FSDP2#
Model Initialization#
Applying fully_shard on submodules: Different from DDP, we should apply fully_shard on submodules as well as the root model. In the transformer example below, we applied fully_shard on each layer first, then the root model
During forward computation of
layers[i], the rest of the layers are sharded to reduce memory footprintInside
fully_shard(model), FSDP2 excludes parameters frommodel.layersand classify remaining parameters into a parameter group for performant all-gather and reduce-scatterfully_shardmoves sharded model to actual training device (egcuda)
Command: torchrun --nproc_per_node 2 train.py
from torch.distributed.fsdp import fully_shard, FSDPModule
model = Transformer()
for layer in model.layers:
fully_shard(layer)
fully_shard(model)
assert isinstance(model, Transformer)
assert isinstance(model, FSDPModule)
print(model)
# FSDPTransformer(
# (tok_embeddings): Embedding(...)
# ...
# (layers): 3 x FSDPTransformerBlock(...)
# (output): Linear(...)
# )
We can inspect the nested wrapping with print(model). FSDPTransformer is a joint class of Transformer and FSDPModule. The same thing happens to FSDPTransformerBlock. All FSDP2 public APIs are exposed through FSDPModule. For example, users can call model.unshard() to manually control all-gather schedules. See “explicit prefetching” below for details.
model.parameters() as DTensor: fully_shard shards parameters across ranks, and convert model.parameters() from plain torch.Tensor to DTensor to represent sharded parameters. FSDP2 shards on dim-0 by default so DTensor placements are Shard(dim=0). Say we have N ranks and a parameter with N rows before sharding. After sharding, each rank will have 1 row of the parameter. We can inspect sharded parameters using param.to_local().
from torch.distributed.tensor import DTensor
for param in model.parameters():
assert isinstance(param, DTensor)
assert param.placements == (Shard(0),)
# inspect sharded parameters with param.to_local()
optim = torch.optim.Adam(model.parameters(), lr=1e-2)
Note the optimizer is constructed after applying fully_shard. Both model and optimizer state dicts are represented in DTensor.
DTensor facilitates optimizer, gradient clipping and checkpointing
torch.optim.Adamandtorch.nn.utils.clip_grad_norm_works out of the box for DTensor parameters. It makes the code consistent between single-device and distributed trainingwe can use DTensor and DCP APIs to manipulate parameters to get full state dict, see “state dict” section below for details. For distributed state dicts, we can save/load checkpoints (doc) without extra communication
Forward/Backward with Prefetching#
command: torchrun --nproc_per_node 2 train.py
for _ in range(epochs):
x = torch.randint(0, vocab_size, (batch_size, seq_len), device=device)
loss = model(x).sum()
loss.backward()
optim.step()
optim.zero_grad()
fully_shard registers forward/backward hooks to all-gather parameters before computation, and reshards parameters after computation. To overlap all-gathers with computation, FSDP2 offers implicit prefetching that works out of the box with the training loop above and explicit prefetching for advanced users to control all-gather schedules manually.
Implicit Prefetching: CPU thread issues all-gather i before layer i. All-gathers are queued into its own cuda stream while layer i computation happens in the default stream. For non-cpu-bound workload (eg Transformer with big batch size), all-gather i+1 can overlap with computation for layer i. Implicit prefetching works similarly in the backward, except all-gathers are issued in the reverse of post-forward order.
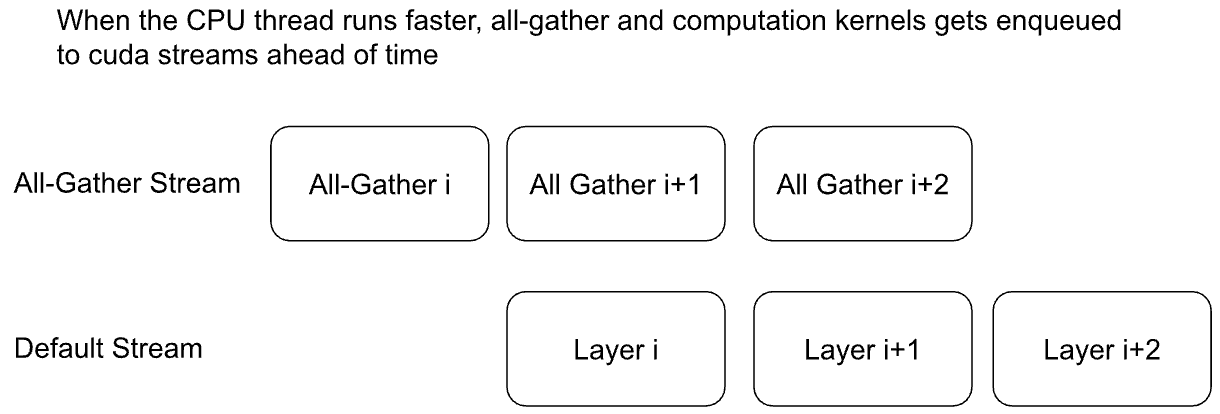
We recommend users to start with implicit prefetching to understand the performance out of the box.
Explicit Prefetching: Users can specify forward ordering with set_modules_to_forward_prefetch, and backward ordering with set_modules_to_backward_prefetch. As shown in the code below, CPU thread issue all-gather i + 1 and i + 2 at layer i
Explicit prefetching works well in following situation:
CPU-bound workload: If using implicit prefetching, CPU thread will be too slow to issue all-gather for layer i+1 when kernels from layer i get executed. We have to explicitly issue all-gather i+1 before running forward for layer i
Prefetching for 2+ layers: Implicit prefetching only all-gathers next one layer at a time to keep memory footprint minimum. With explicit prefetching can all-gather multiple layers at a time to possibly for better perf with increased memory. See layers_to_prefetch in the code
Issuing 1st all-gather earlier: Implicit prefetching happens at the time of calling model(x). The 1st all-gather gets exposed. We can call model.unshard() explicitly earlier to issue 1st all-gather earlier
command: torchrun --nproc_per_node 2 train.py --explicit-prefetching
num_to_forward_prefetch = 2
for i, layer in enumerate(model.layers):
if i >= len(model.layers) - num_to_forward_prefetch:
break
layers_to_prefetch = [
model.layers[i + j] for j in range(1, num_to_forward_prefetch + 1)
]
layer.set_modules_to_forward_prefetch(layers_to_prefetch)
num_to_backward_prefetch = 2
for i, layer in enumerate(model.layers):
if i < num_to_backward_prefetch:
continue
layers_to_prefetch = [
model.layers[i - j] for j in range(1, num_to_backward_prefetch + 1)
]
layer.set_modules_to_backward_prefetch(layers_to_prefetch)
for _ in range(epochs):
# trigger 1st all-gather earlier
# this overlaps all-gather with any computation before model(x)
model.unshard()
x = torch.randint(0, vocab_size, (batch_size, seq_len), device=device)
loss = model(x).sum()
loss.backward()
optim.step()
optim.zero_grad()
Enabling Mixed Precision#
FSDP2 offers a flexible mixed precision policy to speed up training. One typical use case is
Casting float32 parameters to bfloat16 for forward/backward computation, see
param_dtype=torch.bfloat16Upcasting gradients to float32 for reduce-scatter to preserve accuracy, see
reduce_dtype=torch.float32
Comparing with torch.amp, FSDP2 mixed precision has following advantages
Performant and flexible parameter casting: All the parameters inside a
FSDPModuleare cast together at the module boundary (before and after before/backward). We can set different mixed precision policies for each layer. For example, the first few layers can be in float32 while remaining layers can be in bfloat16.float32 gradient reduction (reduce-scatter): Gradients might vary a lot from rank to rank. Reducing gradients in float32 can be critical for numerics.
command: torchrun --nproc_per_node 2 train.py --mixed-precision
model = Transformer(model_args)
fsdp_kwargs = {
"mp_policy": MixedPrecisionPolicy(
param_dtype=torch.bfloat16,
reduce_dtype=torch.float32,
)
}
for layer in model.layers:
fully_shard(layer, **fsdp_kwargs)
fully_shard(model, **fsdp_kwargs)
# sharded parameters are float32
for param in model.parameters():
assert param.dtype == torch.float32
# unsharded parameters are bfloat16
model.unshard()
for param in model.parameters(recurse=False):
assert param.dtype == torch.bfloat16
model.reshard()
# optimizer states are in float32
optim = torch.optim.Adam(model.parameters(), lr=1e-2)
# training loop
# ...
Gradient Clipping and Optimizer with DTensor#
command: torchrun --nproc_per_node 2 train.py
# optim is constructed base on DTensor model parameters
optim = torch.optim.Adam(model.parameters(), lr=1e-2)
for _ in range(epochs):
x = torch.randint(0, vocab_size, (batch_size, seq_len), device=device)
loss = model(x).sum()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=max_norm)
optim.step()
optim.zero_grad()
Optimizer is initialized after applying fully_shard on the model, and holds reference to DTensor model.parameters(). For gradient clipping, torch.nn.utils.clip_grad_norm_ works for DTensor parameters. Tensor ops will be dispatched correctly inside DTensor to communicate partial tensors across ranks to preserve the single device semantic.
State Dicts with DTensor APIs#
We showcase how to convert a full state dict into a DTensor state dict for loading, and how to convert it back to full state dict for saving.
command: torchrun --nproc_per_node 2 train.py
For the 1st time, it creates checkpoints for the model and optimizer
For the 2nd time, it loads from the previous checkpoint to resume training
Loading state dicts: We initialize the model under meta device and call fully_shard to convert model.parameters() from plain torch.Tensor to DTensor. After reading the full state dict from torch.load, we can call distribute_tensor to convert plain torch.Tensor into DTensor, using the same placements and device mesh from model.state_dict(). Finally we can call model.load_state_dict to load DTensor state dicts into the model.
from torch.distributed.tensor import distribute_tensor
# mmap=True reduces CPU memory usage
full_sd = torch.load(
"checkpoints/model_state_dict.pt",
mmap=True,
weights_only=True,
map_location='cpu',
)
meta_sharded_sd = model.state_dict()
sharded_sd = {}
for param_name, full_tensor in full_sd.items():
sharded_meta_param = meta_sharded_sd.get(param_name)
sharded_tensor = distribute_tensor(
full_tensor,
sharded_meta_param.device_mesh,
sharded_meta_param.placements,
)
sharded_sd[param_name] = nn.Parameter(sharded_tensor)
# `assign=True` since we cannot call `copy_` on meta tensor
model.load_state_dict(sharded_sd, assign=True)
Saving state dicts: model.state_dict() returns a DTensor state dict. We can convert a DTensor into a plain torch.Tensor by calling full_tensor(). Internally it issues an all-gather across ranks to get unsharded parameters in plain torch.Tensor. For rank 0, full_param.cpu() offloads the tensor to cpu one by one to avoid peaking GPU memory with unsharded parameters.
sharded_sd = model.state_dict()
cpu_state_dict = {}
for param_name, sharded_param in sharded_sd.items():
full_param = sharded_param.full_tensor()
if torch.distributed.get_rank() == 0:
cpu_state_dict[param_name] = full_param.cpu()
else:
del full_param
torch.save(cpu_state_dict, "checkpoints/model_state_dict.pt")
Optimizer state dict works similarly (code). Users can customize the above DTensor scripts to work with 3rd party checkpoints.
If there is no need for customization, we can use DCP APIs directly to support both single-node and multi-node training.
State Dict with DCP APIs#
command: torchrun --nproc_per_node 2 train.py --dcp-api
For the 1st time, it creates checkpoints for the model and optimizer
For the 2nd time, it loads from the previous checkpoint to resume training
Loading state dicts: We can load a full state dict into a FSDP2 model with set_model_state_dict. With broadcast_from_rank0=True, we can load the full state dict only on rank 0 to avoid peaking CPU memory. DCP will shard tensors and broadcast them to other ranks.
from torch.distributed.checkpoint.state_dict import set_model_state_dict
set_model_state_dict(
model=model,
model_state_dict=full_sd,
options=StateDictOptions(
full_state_dict=True,
broadcast_from_rank0=True,
),
)
Saving state dicts: get_model_state_dict with full_state_dict=True and cpu_offload=True all-gathers tensors and offload them to CPU. It works similarly to DTensor APIs.
from torch.distributed.checkpoint.state_dict import get_model_state_dict
model_state_dict = get_model_state_dict(
model=model,
options=StateDictOptions(
full_state_dict=True,
cpu_offload=True,
)
)
torch.save(model_state_dict, "model_state_dict.pt")
Refer to pytorch/examples for loading and saving optimizer state dicts with set_optimizer_state_dict and get_optimizer_state_dict.
FSDP1-to-FSDP2 migration guide#
Let’s look at an example of an FSDP usage and an equivalent fully_shard usage. We’ll highlight the key differences and suggest steps for migration.
Original FSDP() usage
from torch.distributed.fsdp import FullyShardedDataParallel as FSDP
with torch.device("meta"):
model = Transformer()
policy = ModuleWrapPolicy({TransformerBlock})
model = FSDP(model, auto_wrap_policy=policy)
def param_init_fn(module: nn.Module) -> None: ...
model = FSDP(model, auto_wrap_policy=policy, param_init_fn=param_init_fn)
New fully_shard() usage
with torch.device("meta"):
model = Transformer()
for module in model.modules():
if isinstance(module, TransformerBlock):
fully_shard(module)
fully_shard(model)
for tensor in itertools.chain(model.parameters(), model.buffers()):
assert tensor.device == torch.device("meta")
# Initialize the model after sharding
model.to_empty(device="cuda")
model.reset_parameters()
Migration Steps
Replace the imports
Implement your ‘policy’ directly (apply
fully_shardto the desired sublayers)Wrap your root model with
fully_shardinstead ofFSDPGet rid of
param_init_fnand manually callmodel.reset_parameters()Replace other FSDP1 kwargs (see below)
sharding_strategy
FULL_SHARD:
reshard_after_forward=TrueSHARD_GRAD_OP:
reshard_after_forward=FalseHYBRID_SHARD:
reshard_after_forward=Truewith a 2D device mesh_HYBRID_SHARD_ZERO2:
reshard_after_forward=Falsewith a 2D device mesh
cpu_offload
CPUOffload.offload_params=False:
offload_policy=NoneCPUOffload.offload_params = True:
offload_policy=CPUOffloadPolicy()
backward_prefetch
BACKWARD_PRE: always used
BACKWARD_POST: not supported
mixed_precision
buffer_dtypeis omitted because fully_shard does not shard buffersfully_shard’s
cast_forward_inputsmaps to bothcast_forward_inputsandcast_root_forward_inputsin FSDP1output_dtypeis a new config for fully_shard
device_id: Inferred from device_mesh’s device
sync_module_states=True/False: Moved to DCP. User can broadcast state dicts from rank0 using set_model_state_dict with broadcast_from_rank0=True
forward_prefetch: Manual control over prefetching is possible with
Manually call fsdp_module.unshard()
Use these APIs to control automatic prefetching, set_modules_to_forward_prefetch and set_modules_to_backward_prefetch
limit_all_gathers: No longer needed, because fully_shard removed cpu synchronization
use_orig_params: Original params are always used (no more flat parameter)
no_sync(): set_requires_gradient_sync
ignored_params and ignored_states: ignored_params
